uArm Metal 快速入门指南
2016.06

目录
安全须知
-
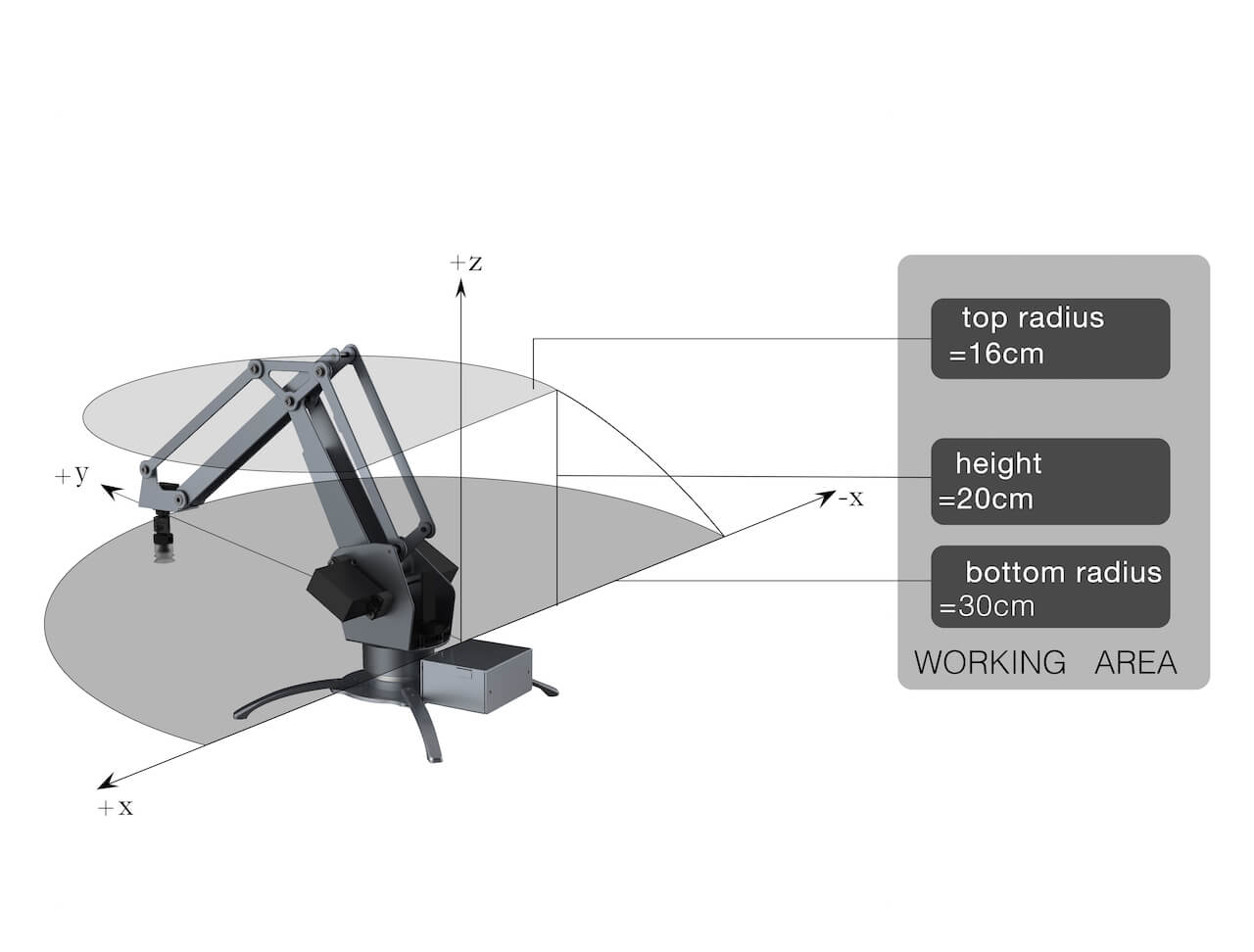
手动操作uArm时,请不要将手放入黄色区域内。

-
操作uArm前,请清理uArm周围环境,给uArm留出足够的活动空间(活动范围入下图),以免uArm在活动过程中毁坏物品或撞到操作者/旁观者。
配件清单

1. uArm Metal机身
2. 电源 x1
3. 电源线 x1
4. 气泵 x1 (附2颗安装螺丝)
5. USB线 x1
6. 脚部支撑 x 4 (附8颗安装螺丝)
7. 螺丝刀 x1
安装说明


操作说明
准备工作
- 接通电源

红灯亮起即已接通电源
- 用USB将uArm连接到电脑
安装软件
不同操作系统上的软件安装方式不同,请直接阅读与您相关的部分。
Windows
第 1 步 - 下载
请在下载中心下载以下软件
- 驱动 - 这是uArm软件在Windows系统上运转的前提
- uClient客户端 - 您将使用此软件控制uArm的运动
- 固件 - 确保uArm能正确理解您在uClient发出的指令
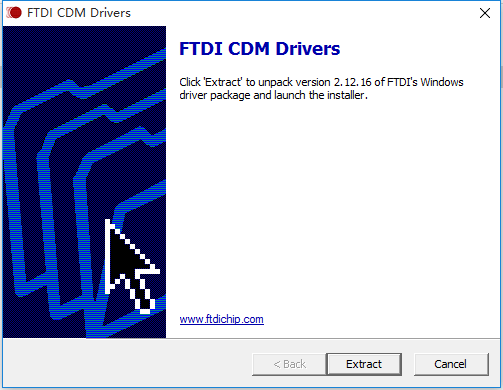
第 2 步 - 安装驱动


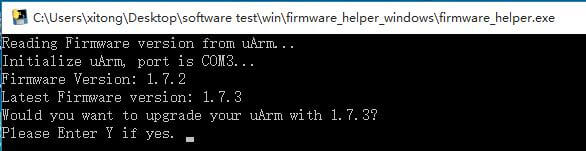
第 3 步 – 安装及更新固件

第 4 步 – 安装JRE (仅在第一次安装uClient时需要)

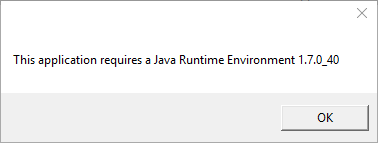
- 如果您是第一次安装uClient,且电脑没有JRE,会有弹出窗口提示您安装 - 点击OK,自动跳转至JRE下载页面,下载JRE并运行 - 安装完成后,运行uClient时将不会再出现该弹窗
MacOS
第 1 步 - 打开 terminal.app

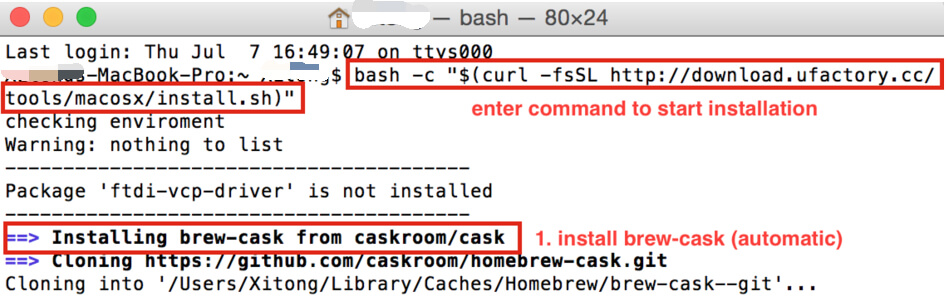
terminal.app via Spotlight Search第 2 步 - 输入命令,开始安装
2.1 将以下命令复制黏贴到terminal,启动安装进程:
bash -c "$(curl -fsSL http://download.ufactory.cc/tools/macosx/install.sh)"
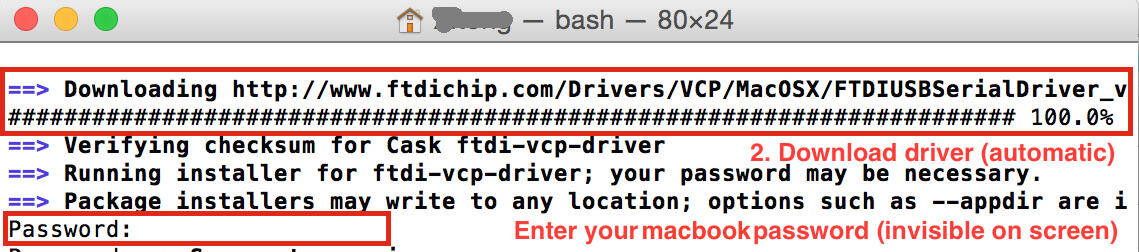
Step 2.2 安装完成后,您会看到以下页面:

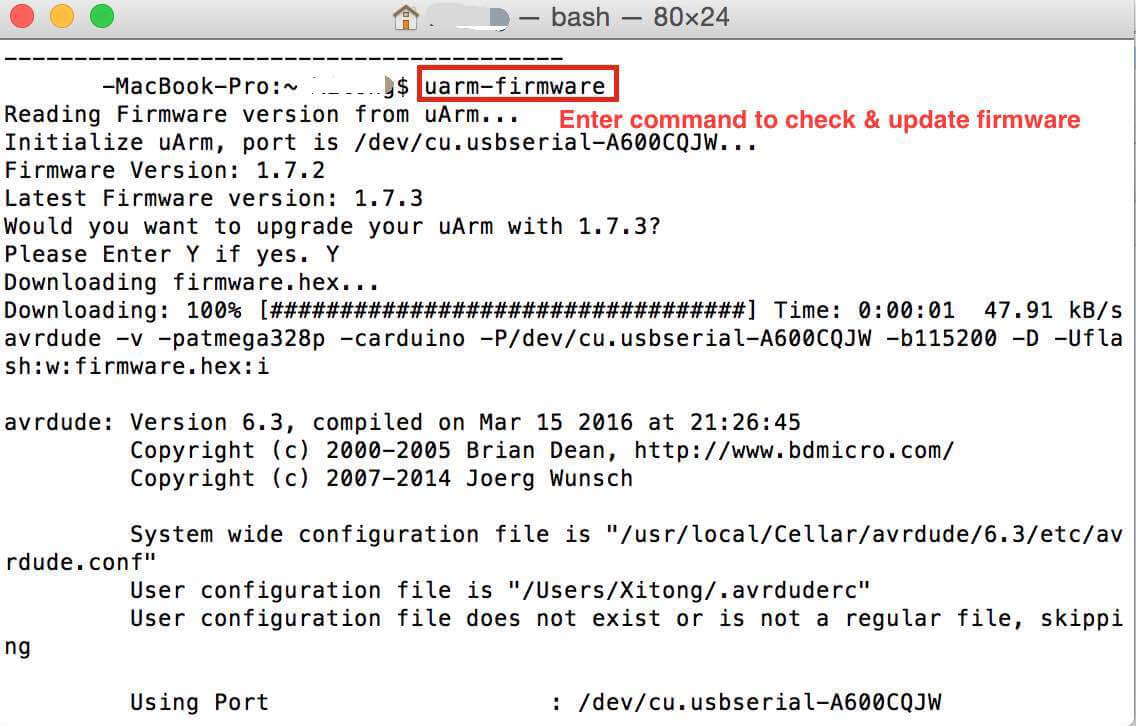
Step 2.3 安装完成后,您可随时使用以下命令: -
uarm-firmware - 检查、更新uArm固件
- uarm-listport - 列出所有已连接的uArm
第 3 步 - 下载uClient客户端
请在下载中心下载uClient
 双击运行
双击运行 uarm_client.exe,玩得开心!Linux
第 1 步 - 安装pip & avrdude
在安装uArm软件环境前,您需要先用Linux的软件包管理工具(如apt, yum等等)安装:
- pip
- avrdude
举例:
sudo apt-get install python-pip python-dev build-essential avrdude
第 2 步 - 安装uArm软件环境
输入以下命令,开始安装
pip install pyuarm
安装完成后,您可随时使用以下命令
- uarm-firmware - 检查、更新uArm固件
- uarm-listport - 列出所有已连接uArm
uClient操作说明
第 1 步 – 选择uArm端口号,单击Connect
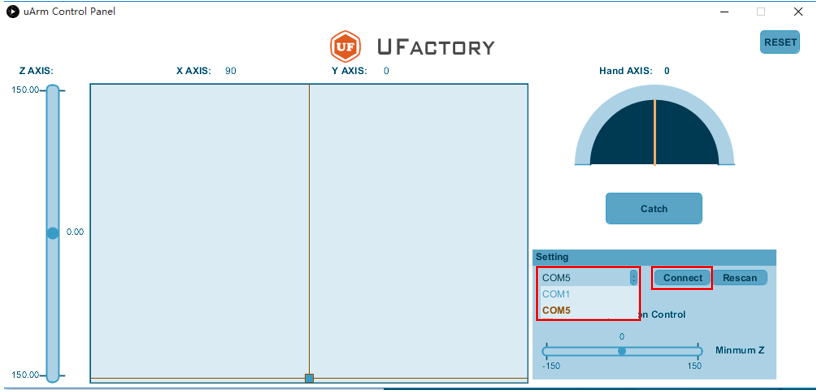
- 若uClient没有检测到您的uArm端口,请点击Rescan - 蓝灯闪烁即说明uArm已接通uClient,无需重复点击Connect
第 2 步 – 用uClient控制uArm
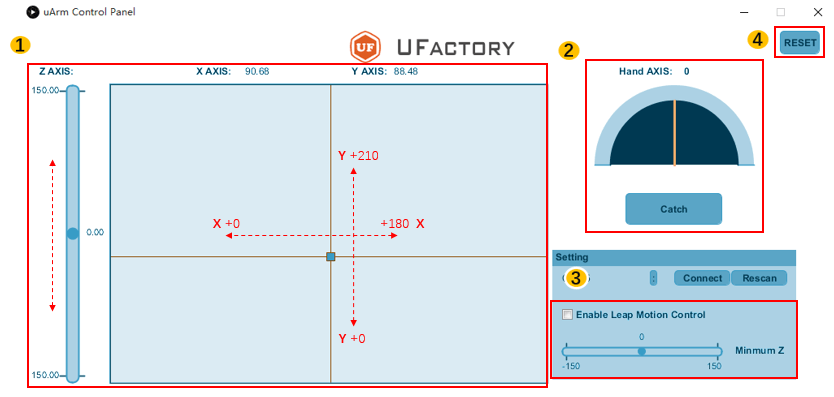
1 - 控制uArm在 X, Y, Z轴上的运动
2 - 控制机械臂末端(吸头/夹具/笔夹)运动
- 移动黄色线可旋转吸头(范围:0° -180°)。夹具和笔夹不可旋转。
- 点击 Catch/Release :1)吸头-吸住/松开;2)夹具:夹紧/松开。笔夹为机械夹具,无需软 件控制。
3 - 通过第三方体感控制器-Leap Motion控制 (除鼠标控制外的另一种控制方式)
如果您有Leap Motion控制器,您可用体感控制 uArm。
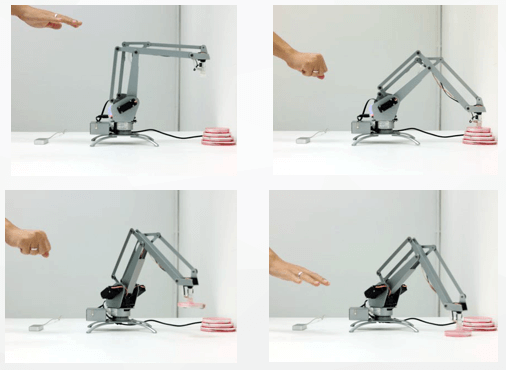
使用 Leap Motion 控制 uArm 前请确保:
① Leap Motion控制器已连接到电脑,且您已在uClient勾选对应方框。
② 将Leap Motion控制器按图示位置摆放(您须面向绿灯)。

③ 您已下载Leap Motion电脑端APP。(关于Leap Motion的更多信息请参考LM官网)
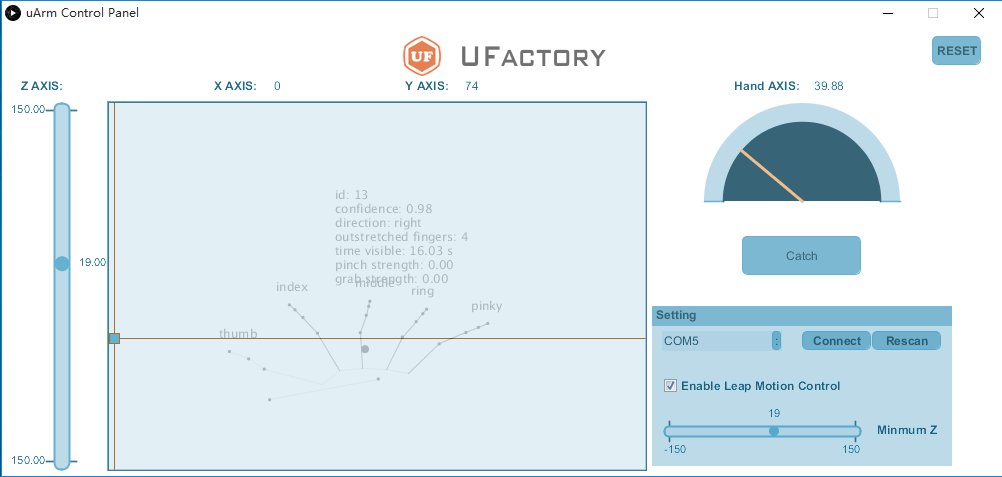
当 uClient 界面如下图所示,您就可以开始用体感控制 uArm 了!
4 - 您可随时将uArm重置到初始位置。
社区支持

扫一扫,关注uArm微信公众号